

کنترل دور موتورهای القایی سه فاز
امروزه در صنعت، ماشینهای متفاوت و با سرعت های مختلف مورد استفاده قرار می گیرد که موارد قابل ذکر عبارتند از : ماشین برش فلزات ، چرثقیل الکتریکی ، ماشینهای مربوط به حمل ونقل وانواع مختلف وسایل چاپ ، معدن ذغال سنگ و صنایع دیگر .برای مثال چرخاننده الکتریکی در ماشین برش فلزات ، سرعت سیستم می باید مطابق با نوع کار ، فلز و کیفیت نوع برش واندازه قطعه مورد نظر ، قابل تنظیم باشد . در کلیه ماشین آلات ذکر شده ، چرخاننده باید مجهز به کنترل سرعت باشد تا بتواند کمیت تولید زیاد ، شرایط کار مطلوب و کیفیت محصول خوب باشد . توسط کنترل سرعت می توان سرعت چرخاننده را به میزان مورد نیاز جهت انجام مراحل کار تغییر داد . مفهوم کنترل سرعت یا تنظیم نبا ید شامل تغییر طبیعی در هنگام اخذ بار شود . تغییر سرعت مورد نیاز در روی موتور چرخاننده و یا عنصر مرتبط به موتور چرخاننده انجام می گیرد ، که ممکن است این عمل با دست توسط اپراتور و یا به طور اتوماتیک توسط وسایل کنترل انجام گیرد . امروزه تنظیم سرعت توسط مدار الکتریکی توسعه یافته و از نظر اقتصادی و نتایج حاصله بر کنترل مکانیکی ارجحیت دارد .موتورهای آسنکرون سه فاز به خاطر امتیازات چشمگیرشان در صنایع کاربرد متنوعی دارند . از آن جمله در سیستمهای محرکه ای که نیاز به تغییر وتنظیم دور دارند بیشتر وبیشتر بکار گرفته می شوند .
۱-کنترل سرعت موتورآسنکرون با اعمال مقاومت در مدار رتور (تغییرات لغزش)
سرعت موتور اندوکسیونی را می توان با قرار دادن مقاومت در مدار رتور کنترل نمود نرمی کنترل سرعت بستگی به تعداد مراحل مقاومت مورد استفاده دارد کنترل در جهت کاهشی از مقدار مبنا می باشد .
به عنوان مقاومت متغییر می توان از رئوستای معمولی پتانسیومتر یا مقسم ولتاژ استفاده نمود اما امروزه ترجیحاً از مقاومت های الکترونیکی استفاده می شود . با گذاشتن یک مقاومت اضافی در مدار رتور ماشین ، شکل منحنی گشتاور- سرعت آن را تغییر داد . تغییر مقاومت رتور باعث تغییر سرعت کار موتور می شود . ولی گذاشتن مقاومت اضافی در مدار رتور یک موتور القایی بازده ماشین را به شدت کم می کند . به خاطر مساله کاهش بازده این روش کنترل سرعت تنها برای فواصل زمانی کوتاه به کار می رود . جهت استفاده کامل از موتور ، تغییر سرعت می بایددر کوپل ثابت انجام گیرد رنج کنترل ثابت ثابت نبوده و بستگی به مقدار بار دارد . با کاهش سرعت به طور قابل ملاحظه ای مشخصه ،سختی خود را از دست می دهد حد کنترل سرعت ۲:۱ تا ۳:۱ می باشد . می باید متذکر شد که کنترل سرعت در این روش مستلزم افت انرژی است افت ها در مدار رتور مستقیماً متناسب با لغزش است یعنی : P1s=2.
۲-کنترل سرعت موتور القایی با تغییر قطب :
این روش برای موتورهای رتور قفسی مناسب است ، زیرا در ماشین های رتور سیم پیچی که برای تعداد قطب معینی سیم پیچی شده اند ، مشکلات اضافی پدید خواهد آورد.
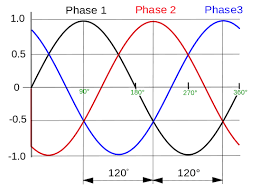
سرعت سنکرون (سرعت زاویه ای ) یک موتور اندوکسیونی تابعی از فرکانس منبع f و تعداد جفت قطب ها p سیم پیچی استاتور می باشد .
سرعت ممکن است با تغییر جفت قطب های سیم پیچی استاتور تغییر کند . در تغییر قطب های موتور سیم پیچی هر فاز متناوباً به دو قسمت مساوی تقسیم می گردد و با کلیدی می توان سیم پیچ ها را سری یا موازی کرد که تعداد جفت قطب ها نصف شده و در نتیجه سرعت ۲ برابر سرعت سنکرون می شود . اما در این حالت نمی توان تغییرات پیوسته در سرعت ایجاد کرد .با به کار گیری تنها یک سیم پیچ می توان تعداد زوج قطب مختلف را تحقق بخشید . این روش اقتصادی تر بوده ، اما قسمتی از سیم پیچ زیر فشار حرارتی بیشتری قرار می گیرد ( زیرا دائم زیر ولتاژ خواهد بود ) .
۳-اتصال دالاندر :
اتصال دالاندر یا سیم پیچ توزیع شده در استاتور ، حالت خاصی از کنترل دور موتور القایی با تغییر تعداد قطب های سیم بندی است که در آن سیم پیچی هر فاز استاتور به دو نیم سیم پیچ تقسیم می شود . در اثر تغییر اتصال نیم سیم پیچ های هر فاز از اتصال سری به موازی تعداد قطب ها نصف و سرعت دو برابر می شود . به این ترتیب فقط به کمک یک سیم پیچی می توان دو سرعت مختلف را بدست آورد و در هر دو حالت تمام سیم پیچ ها وتمام شیارها فعال بوده و نسبت به موتور با سیم پیچ های مجزا از ظرفیت بیشتری برخوردار است . دو حالت اتصال موتور القایی نشان داده شده در شکل مثلث – ستاره دوبل نامیده می شوند.
در اتصال سری دو نیم سیم پیچ ، اتصال موتور به صورت مثلث و در اتصال موازی دو نیم سیم پیچ ها ، اتصال موتور به صورت ستاره است که باعث می شود با دو برابر شدن سرعت ، قدرت موتور نیز تقریباً ۱/۵ برابر شود و گشتاور تقریباً ثابت باقی بماند . بنابراین از اتصال دالاندر برای محرکهای با گشتاور ثابت استفاده می کنند .
تغییر سرعت از طریق تغییر قطبها به سه صورت زیر انجام می گیرد :
۱- تغییر سرعت تحت گشتاور ثابت:
برای سرعت پایین اتصال مثلث بوده و برای سرعت بالا اتصال بصورت ستاره دوبل است . قدرت تحت سرعت بالا نسبت به قدرت تحت سرعت پایین افزایش یافته است ، افزایش سرعت با افزایش قدرت همراه بوده پس گشتاور ثابت است.
۲- تغییر سرعت تحت قدرت ثابت:
در هر دو اتصال سرعت زیاد وسرعت کم توان خروجی موتور تقریباً ثابت است.
۳- تغییر سرعت تحت گشتاور و قدرت متغییر:
گشتاور موتور مانند بارهای پنکه ای با تغییر سرعت تغییر می کند .
کنترل سرعت با تغییر قطب بر حسب فرکانس منبع و تعداد جفت قطب ها سرعت ثابتی می دهد . برای مثال برای موتور های ۴ سرعته و با فرکانس ۵۰ هرتز سرعت های زیر وجود دارد .
(۱۵۰۰/۱۰۰/۷۵۰/۵۰۰ ) (۳۰۰۰/۱۵۰۰/۷۵۰/۵۰۰ )
( ۳۰۰۰/۱۵۰۰/۱۰۰۰/۵۰۰ ) ( ۱۰۰۰/۷۵۰/۵۰۰/۳۷۵ )
از سرعت هائی که در بالا ذکر شد دیده می شود رنج کنترل سرعت از ۶:۱ تا ۸:۱ است و افزایش این رنج نیز غیر عملی است . برای سرعت ۳۷۵ r.p.m لازم است موتوری با اندازه خیلی بزرگ طراحی شود .
کنترل سرعت با تغییر فرکانس خط:
اگر فرکانس الکتریکی ولتاژ اعمال شده به استاتور یک موتور القایی تغییر کند ، آهنگ چرخش میدانهای مغناطیسی آن nsync نیز متناسب با فرکانس می کند ، و نقطه بی باری منحنی مشخصه گشتاور – سرعت نیز به همراه آن تغییر می کند . سرعت سنکرون موتور در شرایط نامی را سرعت پایه می نامند . با استفاده از فرکانس متغییر می توان سرعت موتور را در بالاتر یا پایین تر از سرعت پایه کنترل کرد . با این کنترل می توان سرعت موتور را در گستره ای از حدود ۵ درصد سرعت پایه تا دو برابر سرعت پایه کنترل کرد. ولی این نکته مهم است که محدودیت های ولتاژ و گشتاور خاصی با فرکانس در نظر گرفته شود ، تا عملکردی مطمئن به دست آید . وقتی موتور با سرعتی پایین تر از سرعت پایه کار می کند ، باید ولتاژ پایانه ای اعمال شده به استاتور برای داشتن عملکرد مناسب کاهش یابد ولتاژ پایا نه ای اعمال شده به استاتور باید با کاهش فرکانس استاتور به طور خطی کم شود . این فرایند را تنزل می نامند اگر این کار انجام نشود فولاد هسته موتور القایی اشباع شده ، جریانهای مغناطیس شدیدی در ماشین جریان می یابد .
برای اینکه این جریانهای مغناطیس شدید به وجود نیاید، در مواردی که فرکانس از فرکانس نامی موتور کمتر می شود معمولاً ولتاژ استاتور را متناسب با فرکانس کم می کنند. هر گاه ولتاژ اعمال شده به یک موتور القایی در فرکانسهای زیر سرعت پایه به طور خطی تغییر یابد ، شار موتور تقریبا ثابت می ماند . بناباین گشتاور ماکزیممی که موتور می تواند تأمین کند نسبتاً بالا می ماند . ولی ماکزیمم توان مجاز موتور باید با کاهش فرکانس به طور خطی کم شود تا از گرم شدن مدار استاتور جلوگیری شود . توان داده شده به موتور القایی سه فاز عبارت است از :
اگر ولتاژ VL کم شود ، توان ماکزیمم نیز باید کم شود ، و گر نه جریان زیادی از موتور می گذرد که میتواند باعث افزایش شدید گرمای موتور شود .
منحنی مشخصه گشتاور –سرعت برای تمام فرکانسها:
کنترل سرعت با تغییر ولتاژ خط:
گشتاوری که یک موتور القایی تولید می کند با مربع ولتاژ اعمال شده به آن متناسب است. با تغییر ولتاژ خط می توان سرعت موتور را در گستره محدودی کنترل کرد . این روش کنترل سرعت گاهی اوقات در موتورهای کوچک کرداننده پنکه ها به کار می رود . این تغییر ولتاژ پایانه استاتور می تواند توسط اتو ترانسفورماتور با خروجی متغییر انجام گیرد . یکی دیگر از روشهای تغییر ولتاژ استفاده از کنترل کننده های حالت جامد یا الکترونیکی است . اتو ترانسفورماتور به ماشین ولتاژ سینوسی اعمال می کند ، اما کنترل کننده های حالت جامد ولتاژ غیر سینوسی برای موتور فراهم می نمایند .
کنترل سرعت توسط تغییر فرکانس لغزش:
در این روش سرعت یک موتور القایی با تزریق کردن ولتاژی به مدار رتور تحت کنترل در می آید البته لازم است فرکانس ولتاژ اعمال شده با فرکانس لغزش یکسان باشد . وقتی ولتاژی اعمال می کنیم که در فاز مخالف نسبت به نیروی محرکه الکتریکی رتور القا شده قرار دارد ، مقاومت رتور را افزایش می دهد ، در صورتی که وقتی ولتاژی اعمال می کنیم که هم فاز با نیروی محرکه الکتریکی رتور القا شده می باشد مقاومت آنرا کاهش می دهد ( بطور متعادل ) لذا به وسیله تغییر دادن مقاومت رتور ، می توان سرعت را کنترل کرد . چنین روشی از نوع کنترل سرعت را سیستم کرامر (Kramer) می نامند . که در مورد موتورهای بزرگ ۵۰۰۰ قوه اسبی یا بالاتر ار آن بکار می رود.
مبدل فرکانسی وارد – لئونارد (ward – Leonard )
دو ماشین آسنکرون رتور قفسی سایر اجزاء تشکیل دهنده این مبدلند . بدین وسیله موازنه مطلوبی برای انرژی ماشین ها و شبکه موجود خواهد بود. امتیاز این مدار تغییر دوری پیوسته در محدوده وسیعی است .
ماشینی که خود مبدل فرکانسی است ( موتور شراگ – ریشتر (Schrage – richter)یا شربیوس (scherbius )نامیده می شود.
این موتور در سال۱۹۱۲ توسط شراگ و ریشتر توسعه یافته و نام آنان را به خود گرفته است .این موتور با تغذیه رتوری و نوع شنت است که جاروبک متغییر کموتاتور سه فاز القایی است که برای کنترل سرعت و هم بهبود ضریب قدرت قابلیت تنظیم دارد.در حقیقت این موتور القایی حلقه های لغزان قابل تنظیم دارد . در این موتور سه سیم پیچی وجود دارد دو تا از سیم پیچها در روتور و سومی در استاتور قرار گرفته اند.
وضعیت سه سیم پیچی به شرح زیر است :
۱- سیم پیچ تحریک : این سیم پیچ در قسمت پایین شیارهای رتور قرار گرفته است و از طریق حلقه های لغزان و جاروبک ها با فرکانس شبکه تغذیه می شود این سیم پیچ ها شار کاری در ماشین تولید می کند .
۲- سیم پیچی هدایت : این سیم پیچ غالباً بنام سیم پیچ جبرانگر یا سیم پیچ سوم خوانده می شود این سیم پیچ نیز در بالای روتور جا داده می شود و مشابه سیم بندی آرمیچرهای ماشین های dc به کموتاتور متصل می شود .
۳- سیم پیچی استاتور : این سیم پیچی در شیارهای استاتور قرار می گیرد ولی انتهای سیم پیچی هر فاز به یک جفت زغال وصل می شود که بر روی کموتاتور قرار داده می شوند این ذغالها بر روی دو قطعه مجزای نگهدارنده جاروبک قرار گرفته اند که برای چرخش در دو جهت مخالف هم طراحی شده اند .
مدار کاسکاد :
موتور جریان داتم توسط مبدل استاتیکی ( یکسو ساز ) از طریق شبکه تحریک می گردد . اما تغذیه مدار آرمیچر از طریق رتور موتور آسنکرون رتور سیم پیچی عملی می شود . برای این منظور جریان متناوب توسط یکسو سازی به جریان مستقیم تبدیل گردیده و توسط مقاومتی به مدار آرمیچر منتهی می شود . در اینجا مقاومت جهت کوپلاژ دو ماشین بوده و ضمن کار اتصال کوتاه می گردد . بدین ترتیب از رتور موتور آسنکرون رتور سیم پیچی شده استفاده می شود . ماشین جریان داتو در مقایسه با ماشین آسنکرون کوچک می باشد ، زیرا UA=UR است . دو ماشین مضافاً کوپلاژ مکانیکی هستند .خوبی مدار کاسکاد در آنست که از قابلیت تنظیم دور نسبتاً آسان ماشین جریان دائم جهت تنظیم دور ماشین آسنکرون استفاده می شود . علاوه بر آن توان الکتریکی رتور موتور آسنکرون به شکل انرژی مکانیکی روی محور مشترک بر گردانده می شود .
محرک های تنظیم پذیر سرعت (Adjustable Speed Drive)
نیمه هادی های قدرت در سیستمهای کنترل سرعت از نوع ایستا یا استاتیکی هستند . باید دانست که ترکیب سیستمهای الکترونیک قدرت (مانند کنترل کننده های ولتاژ ) و متوتورهای الکتریکی همراه با مکانیسم کنترل آنها را محرکهای تنظیم پذیر سرعت می نامند که ما به اختصار آنرا ASD می نامیم . در حقیقت این محرک ها قابل تنظیم بوده و برای کنترل سرعت یا کنترل دور موتورهای الکتریکی مورد استفاده قرار می گیرند .
محرکهای تنظیم پذیر سرعت (ASD) برای کنترل سرعت موتورهای القائی از نقطه نظر کاربرد به سه دسته تقسیم می شوند:
۱– ASD از نوع ولتاژ متغییر و فرکانس ثابت:
در اینگونه سیستمها دامنه ولتاژ اعمالی به استاتور کنترل می شود . برای این مقصود از کنترل کننده ولتاژ در سر راه موتور استفاده شده است . این نوع محرک ها در سطوح قدرت متوسط و پایین مورد استفاده قرار می گیرند . برای مثال می توان از بادبزن های نسبتاً بزرگ یا پمپ ها نام برد . در این روش ولتاژ استاتور را می توان بین صفر و ولتاژ اسمی در محدوده زاویه آتش بین صفر تا ۱۲۰ درجه تنظیم و کنترل نمود . این سیستم بسیار ساده بوده و برای موتورهای القائی قفس سنجابی کلاس D با لغزش نسبتاً بالا( ۱۰ تا ۱۵ درصد ) مقرون به صرفه است . عملکرد این محرکها زیاد جالب توجه نیست .
۲- ASD از نوع ولتاژ و فرکانس متغییر:
اگر منبع تغذیه استاتور از نوع فرکانس متغییر انتخاب شود ، عملکرد محرک های تنظیم پذیر سرعت (ASD) بهبود می یابد . باید دانست که شار در فاصله هوایی متورهای القائی با ولتاژ اعمالی به استاتور متناسب بوده وبا فرکانس منبع تغذیه نسبت عکس دارد . بنابراین اگر فرکانس را کم کنیم تا کنترل سرعت در زیر سرعت سنکرون امکان پذیر گردد و ولتاژ را معادل ولتاژ اسمی ثابت نگه داریم ، در این صورت شار فاصله هوایی زیاد می شود . برای جلوگیری از بوقوع پیوستن اشباع بخاطر افزایش شار ، ASD از نوع فرکانس متغییر باید از نوع ولتاژ متغییر نیز باشد تا بتوان شار فاصله هوایی را در حد قابل قبولی نگه داشت ، معمولا به این سیستم کنترل ، سیستم کنترل V/F ثابت نیز گفته می شود . یعنی اگر فرکانس را کم کردیم باید ولتاژ را طوری کم کنیم که شار در فاصله هوایی در حد اسمی خود باقی بماند . از این سیستم برای کنترل سرعت موتورهای قفس سنجابی کلاسهای A، B ،C، D استفاده می شود .
۳-ASD که بر اساس بازیافت توان لغزشی کار می کند:
در این سیستمها با استفاده از مدارهای نیمه هادی قدرت که به پایانه رتور وصل می شوند ، بازیافت توان( یا توان برگشتی) در فرکانس لغزشی به خط تغذیه موتور منتقل می گردد . باید دانست فرکانس لغزشی از حاصلضرب فرکانس منبع و لغزش موتور بدست می آید. بطور کلی در این طرح بر روی مدار رتور کنترل خواهیم داشت . در اینجا متذکر می شویم که ASD از نوع فرکانس متغییر بر دو نوع است :
الف : طرح های حاوی ارتباط DC (جریان مستقیم)
ب : سیکلو کنورتورها
در طرح های حاوی ارتباط DC منبع تغذیه AC توسط یکسوساز ، یکسو شده و سپس توسط اینورتر مجدداً به منبع AC دست می یابیم . اینورتر ها بر دو نوع اند :
۱- اینورترهای تغذیه ولتاژ (اینورترهای ولتاژ )
۲- اینورترهای تغذیه جریان ( اینورترهای جریان )
در اینورترهای ولتاژ ، متغییر تحت کنترل همان ولتاژ و فرکانس اعمالی به استاتور است . در اینورترهای جریان بر دامنه جریان وفرکانس استاتور کنترل داریم . اینورترهای ولتاژ بر دو نوع اند :
۱-اینورترهای با موج مربعی
۲- اینورترهای با مدولاسیون عرض یا پهنای پالس (PWM) .
کنترل دور موتور القائی سه فاز توسط اینورتر منبع جریان:
۱- ترکیب اساسی مبدلها
سرعت یک موتور القائی توسط سرعت سنکرون ولغزش رتور تعیین می گردد . سرعت سنکرون بستگی به فرکانس تغذیه دارد و لغزش را می توان با تنظیم ولتاژ و جریان اعمالی به موتور تغییر داد . به طور کلی روشهای کنترل دور موتورهای القائی را می توان بصورت زیر تقسیم بندی نمود :
۱- ولتاژ متغییر ، فرکانس ثابت
۲- ولتاژ وفرکانس متغییر
۳- جریان و فرکانس متغییر
۴- تنظیم قدرت لغزشی
به منظور ایجاد ولتاژ و فرکانس متغییر از مبدلهای ولتاژ استفاده می گردد که توسط یک منبع ولتاژ dc تولید شکل موج مستطیلی ولتاژ در سمت ac می نمایند که دامنه آن مستقل از بار بوده و به همین دلیل اینورتر های منبع ولتاژ نام دارند . برای ایجاد جریان وفرکانس متغییر از مبدلهای جریان استفاده می گردد که توسط یک منبع جریان dc تولید شکل موج مستطیلی جریان در سمت ac می نمایند ، که دامنه آن مستقل از بار بوده و بنابراین اینورترهای منبع جریان نام دارند . منبع جریان کنترل شده در ورودی اینورتر توسط یکسو ساز تریستوری ایجاد می گردد که با کنترل جریان توسط حلقه فیدبک جریان وسلف بزرگ صافی در خروجی آن ویژگیهای یک منبع جریان را پیدا می کند . مبدل موجود در سمت موتور جریان مستقیم را تبدیل به جریان سه فاز با فرکانس قابل تنظیم می نماید . سلف بزرگ موجود در حلقه dc سبب صاف نمودن جریان می گردد . سیستم رانش اینورتر منبع جریان مناسب برای عملکرد در حالت تک موتوره می باشد و دارای قابلیت بازگشت انرژی به شبکه ac میباشد . جریان اینورتر توسط حلقه فیدبک جریان کنترل شده و اضافه جریانهای گذرا توسط تنظیم کننده جریان و سلف صافی حذف می گردند و بدین وسیله مجموعه دارای قابلیت استحکام و اطمینان مناسب برای کاربردهای صنعتی می گردد سلف بزرگ سری صافی نرخ افزایش جریان خطا را در هنگام کموتاسیون نا موفق در اینورتر و یا اتصال کوتاه در ترمینالهای خروجی محدود می نماید با حذف سیگنالهای فرمان گیت تریستورهای یکسو ساز می توان بدون از بین رفتن فیوزها و آسیب رسیدن به اینورتر ، تنها با از دست دادن لحظه ای گشتاور خطا را از بین برد .
۲- مدار قدرت اینورتر منبع جریان
به منظور ایجاد منبع جریان متغییر dc سیگنال بیانگر جریان تنظیم شده با جریان واقعی مقایسه شده ، خطای حاصل تقویت و برا ی کنترل زاویه آتش تریستورهای یکسو ساز استفاده می گردد تا جریان مورد نیاز در خروجی ایجاد گردد. روشن نمودن یک تریستور سبب قطع تریستور هادی فاز مجاور می گردد . دو بانک خازی که بصورت مثلث ، متصل می باشند انرژی مورد نیاز برای کموتاسیون ذخیره کرده و دیودهای D1 الی D6 خازنها را از بار ایزوله می نمایند . ترتیب هدایت تریستورهای اینورتر به گونه ای است که جریانهای DC تنظیم شده از دو تریستور یکی متصل به خط مثبت ودیگری متصل به خط منفی تغذیه عبور می نماید . در هر نیم سیکل به مدت ۶۰o هر دو تریستور واقع بر یک بازو قطع بوده بنابراین جریان خط برابر صفر می باشد . مزیت عمده اینورتر منبع جریان سادگی مدار لازم برای کموتاسیون تریستورها می باشد . مدار کموتاسیون تنها شامل خازنها و دیودها بوده و به دلیل حذف سلفهای کموتاسیون ، فرکانس عملکرد افزایش یافته نویز صوتی کاهش می یابد . خازن کموتاسیون به گونه ای طراحی می شود که ولتاژ معکوس اعمالی بر تریستور ها محدود گردد تا باعث ایجاد زمان خاموشی لازم گردد. به همین دلیل زمان خاموشی در دسترس به اندازه کافی زیاد می باشد تا بتوان از تریستور های غیر سریع یکسوسازی استفاده نمود، که این امر اینورتر منبع جریان را در قدرت های متوسط به بالا بسیار اقتصادی می سازد
۳- عملکرد موتو القائی تغذیه شده توسط منبع جریان
هنگامی که اینورتر منبع جریان یک بار الکتریکی را تغذیه می نماید ، شکل موج ولتاژ توسط پاسخ بار به جریان اعمالی تعیین می گردد . رابطه ولتاژ- جریان یک سلف به صورت V=L di / dt بوده که در آن di/dt نرخ تغییرات جریان می باشد . بنابراین شکل موجهای ایده ال جریان در عمل انکار پذیر نیستند زیرا تغییر پله ای لحظه ای جریان سبب ایجاد پرش ولتاژ با دامنه نا محدود خواهد گردید . در مدارات عملی نرخ تغییرات جریان برای محدود نمودن حداکثر ولتاژ در حد تحمل تریستورها محدود می گردد . مدت زمان کموتاسیون که در طول آن جریان بار از یک فاز به فاز دیگر منتقل می گردد بایستی به حد کافی طولانی باشد تا نرخ تغییرات جریان در حد قابل قبولی کاهش یابد این محدودیت در مورد اینورترهای منبع ولتاژ مطرح نمی گردد چرا که در این مورد دیودهای فیدبک مسیری را برای جریان بار القائی ایجاد می نمایند که باعث شارژ خازن حلقه dc گشته ، از قطع ناگهانی جریان بار جلوگیری کرده و ولتاژ خروجی اینورتر را محدود می نمایند . اما در مورد اینورتر منبع جریان به دلیل عدم وجود دیودهای فیدبک ، مسیری برای جریان معکوس وجود نداشته و مدت زمان کموتاسیون را می توان به قیمت افزایش ضربه های ولتاژ اعمالی بر ادوات نیمه هادی قدرت اینورتر کاهش داد .













عالی بود ممنون از آموزش برق صنعتی تون
سلام.
ازحسن نظر جنابعالی ممنونیم.
امیدواریم که ازنظرات سازنده شما در این سایت استفاده ببریم.لطفا این سایت را به دوستان خود معرفی نمایید.باتشکر.
سلام ممنون از شما ,
یه الکترو موتور سه فاز 7.5 اسب با گیر بکس 31 دور در دقیقه دارم که میخواستم بدونم اگر بخوام دور موتور رو کنترول کنم به چه تجهیزاتی نیاز دارم
با تشکر
سلام.
یک درایو فرکانس متغیر (VFD) که، درایو با فرکانس قابل تنظیم، درایو اینورتر، درایو میکرو و درایو دور متغیر نیز شناخته می شود در واقع یک نوع درایو با سرعت قابل تنظیم است که با تغییر فرکانس و ولتاژ ورودی به موتورهای AC سرعت و گشتاور این موتورها را کنترل می کنند.
VFDs در بخش های کاربردی مختلف اعم از لوازم خانگی کوچک تا بزرگترین درایوهای آسیاب معدن و کمپرسورهای صنعتی استفاده می شود. با این حال، تنها حدود ۲۵ درصد از انرژی الکتریکی مورد استفاده در جهان از این تکنولوژی استفاده می کنند که با توجه به وضعیت انرژی های فسیلی در آینده مطمئنا نیاز بیشتری برای استفاده از این تجهیزات احساس خواهد شد.
همچنین با افزايش كاربرد موتورهاي القايي در صنعت بحث كنترل اين موتورها اهميت ويژه اي پيدا كرده است. درايو VFD يك سيستم براي كنترل كردن سرعت يك موتور AC با كنترل كردن فركانس تغذيه اعمال شده به موتور الكتريكي است.
VFD به نام هاي AFD يا VSD نيز خوانده مي شود. همچنين به مدارهاي اينورتري كه داراي فركانس و ولتاژ خروجي قابل تغيير باشند درايو الكتريكي گفته مي شود.
سلام وقت بخیر یه سوال برام پیش اومده که چرا در اینورتر ها برای ترمز مغناطیسی فرمان کنتاکتور باید از رله داده بشه در واقع نقش کنتاکتور چیه
سلام لطفا فرم تماس باکارشناسی را تکمیل نمایید وجواب خود را بصورت کامل دریافت کنید.
باتشکر از تماس شما