

ابزاردقیق- PID کنترل
بهترین پاسخ
P کنترل کننده تناسبی میباشد.
I کنترل کننده تناسبی میباشد و باطراحی مناسب آن باعث کاهش خطا (OFFSET) شده ولی در عوض پایداری سیستم را تضعیف میکند و سیستم را کند
D کنترل کننده مشتقی میباشد و باطراحی مناسب آن باعث افزایش پایداری و افزایش سرعت پاسخ سیستم شده و عیب آن تقویت سیگنال نویز است
و در کل PID همواره به شرط پایداری سیستم کلی خطا را تقریبا صفر میکند…
ابزاردقیق- PID کنترل
دیگر پاسخ ها
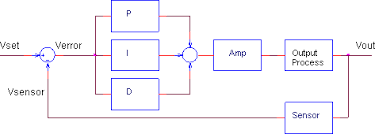
الگوریتم پیآیدی از رایج ترین نمونه های الگوریتم کنترل بازخوردی است که در بسیاری از فرایندهای کنترلی نظیر کنترل سرعت موتور DC ، کنترل فشار، کنترل دما و … کاربرد دارد. هدف از به کار بردن الگوریتم PID در کنترل حلقه بسته ، کنترل دقیق و سریع خروجی سیستم تحت شرایط متفاوت و بدون دانستن دقیق رفتار سیستم در پاسخ به ورودی است. PID از سه قسمت مجزا به نام های Proportional (تناسب) ،Integral (انتگرال) و Drivative (مشتق) تشکیل شده که هر کدام از انها سیگنال error را به عنوان ورودی گرفته و عملیاتی را روی ان انجام می دهند و در نهایت خروجی شان با هم جمع میشود. خروجی این مجموعه که همان خروجی PID است برای اصلاح خطا (error) به سیستم فرستاده می شود.
اگرچه در بسیاری از کنترلرها به علت حساسیت عبارتِ مشتق نسبت به نویز و اجرای دشوار ان، از ان صرف نظر و کنترل را به صورت PI پیاده سازی می کنند. سیگنال (U(t ( خروجی PID ) بر اساس نسبتی از خطای کنونی سیستم (عملکرد حاضر) ، به اضافه مجموع خطاهای سیستم (رفتار گذشته) ، به اضافه مشتق خطای کنونی (تخمین خطی رفتار اینده) محاسبه میشود و برای اصلاح خطا به سیستم اعمال میگردد. ضرایب k ، Ti و Td نیز میتوانند با تکنیک های شناخته شده ای مانند تابع انتقال به صورت بهینه محاسبه شوند، اگرچه در کاربردهای عملی ، بطور رضایت بخش میتوانند با ازمون و خطا و مشاهده رفتار سیستم بطور تقریبی تعیین گردند
ابزاردقیق- PID کنترل
کنترل کننده PID یک ابزار متعارف است که کاربرد اصلی آن در صنعت می باشد و معمولا برای کنترل و تنظیم سرعت، دما ، جریان ، فشار و … استفاده شود. کنترل کنندهPID را می توان در نزدیکی سنسور ( حسگر ) و یا ابزار تنظیم کنترل قرار داد و با استفاده از SCADA به وسیله مانیتور،کنترل و بررسی را با استفاده از آن انجام داد.
یکی دیگر از کاربرد های کنترل کننده دمای PID را می توان کنترل تغییر پیوسته یک تنظیم گر دانست که امکان دارد این کار به کمک ابزار های تغیر پالس ( سوییچ ) برای گرمکن های الکتریکی یا بوسیله باز و بسته گر یک دریچه گاز انجام شود.عملکرد کنترل کننده PID :
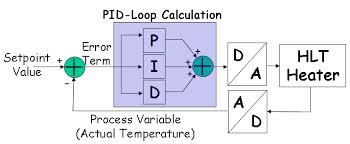
کنترل کننده حرارت PID صرفا از دما برای وارون عمل خروجی استفاده می نماید .بیشترین توان عملیات زمانی است که دمای موجود زیر دمای در نظر گرفته شده است و کمترین توان اعمالی زمانی است که دما بالای نقطه در نظر گرفته شده باشد.این نوع کنترل کننده معمولا برای تزریق و یا خارج نمودن دما از خنک کننده اضافی استفاده می نماید و در اکثر مواقع به کنترل کننده های افزون کننده نیاز دارند.کنترل کننده PIDسیگنال های مربوط به یک سنسور را از یک ترموکوپل دریافت می کند و به مقدار مشخصی مثل درجه سانتی گراد تبدیل می کند. پس از آن مقدارهای اندازه گیری شده را از دمای در نظر گرفته شده کم می کند تا میزان خطا را مشخص نماید.
از خطا در یک بازه زمانی میانگین می گیرند و پس از آن در ثابت ضرب می شود و در مرحله بعد با جریان خروجی کنترلر جمع می شودودر نتیجه خطای مربوط به حالت ماندگار در سیستم را نمایش می دهد .
کنترل PID از حاصل جمع سه کنترل کننده تناسبی، انتگرالی، مشتق گیر،که در مقاله قبلی شرح داده شدند تشکیل شده است . به عنوان مثال ما می خواهیم دمای هیتر را روی ۵۰ درجه سانتیگراد تثبیت کنیم پس مقدار مطلوب ما یا همان Set Point برابر با SP=50 می باشد.
اگر ما سیگنالی به هیتر اعمال کنیم و دمای هیتر ۵۰ درجه شود یعنی اینکه سیگنال خطا برابر با صفر شده پس فقط کنترل کننده تناسبی وارد عمل می شود و پروسه را کنترل می کند و قسمت انتگرالی و مشتق گیری ما مقدار صفر را خواهند داشت. OUT=P+0+0
اگر دمای اندازه گیری شده بیشتر یا کمتر از مقدار SP شود آنگاه کنترل کننده انتگرالی و مشتق گیر وارد عمل خواهند شد تا پروسه را به مقدار مطلوب برسانند. OUT=P+I+D وقتی این دو کنترل کننده وارد عمل خواهند شد که ما سیگنال خطا داشته باشیم (صفر نباشد) آنگاه قسمت انتگرالی از سیگنال خطا انتگرال می گیرد و قسمت مشتق گیر هم از سیگنال خطا مشتق می گیرد که حاصل جمع این سه خروجی PID ما می باشد.
روشن است که کنترل PID چه کاربرد مهمی در پروسه ها مخصوصا پروسه های غیر قابل پیش بینی دارد. PID با استفاده خطا های قبلی و خطا های حال، آینده را پیش بینی کرده و تدابیری برای کنترل هر چه بهتر سیستم ایجاد می کند.

ابزاردقیق- PID کنترل
A proportional-integral-derivative controller (PID controller) is a control loop feedback mechanism (controller) widely used in industrial control systems. A PID controller calculates an error value as the difference between a measured process variable and a desired setpoint. The controller attempts to minimize the error by adjusting the process through use of a manipulated variable.
The PID controller algorithm involves three separate constant parameters, and is accordingly sometimes called three-term control: the proportional, the integral and derivative values, denoted P, I, and D. Simply put, these values can be interpreted in terms of time: P depends on the present error, I on the accumulation of past errors, and D is a prediction of future errors, based on current rate of change.[1] The weighted sum of these three actions is used to adjust the process via a control element such as the position of a control valve, a damper, or the power supplied to a heating element.
A PID controller relies only on the measured process variable, not on knowledge of the underlying process, making it a broadly useful controller.[2] By tuning the three parameters in the PID controller algorithm, the controller can provide control action designed for specific process requirements. The response of the controller can be described in terms of the responsiveness of the controller to an error, the degree to which the controller overshoots the setpoint, and the degree of system oscillation. Note that the use of the PID algorithm for control does not guarantee optimal control of the system or system stability.
Some applications may require using only one or two actions to provide the appropriate system control. This is achieved by setting the other parameters to zero. A PID controller will be called a PI, PD, P or I controller in the absence of the respective control actions. PI controllers are fairly common, since derivative action is sensitive to measurement noise, whereas the absence of an integral term may prevent the system from reaching its target value due to the control action.








